 Rocket outline
Rocket outline

- Rocket – Fly in sustainer ready version, as stable as possible.
- Motor – DECA 8 grain KNDX
- Fin can – New fin can – according to new alignment method – with enlarged fins to allow for a higher stability margin.
- Recovery – Design as per DECA III, 2,0 gram BP straw separation charge.
- Payload – Newly machined payload airframe tube, same payload as the DECA III and to include Beeline GPS tracker into nosecone. New #11 HD camera looking down
- Nosecone – Same as DECA III
- Documentation – Standard: Aerolab, Altical, NERO RSDS & include reference check with RockSim.
Diameter: 58mm
Length: 1972mm
Weight fully loaded as-built: 4.918gr of which was 1.178gr propellant
Cd derrived from flight data: 0,85
Motor: DECA 8 grain KNDX. Total impuls & Isp from flight data: 1.417Ns. Isp 122,7s
Goals
- Fly in sustainer ready version, as stable as possible to 2+km.
- Construct a DECA 8 grain KNDX
- Check usability of outside mounted key chain camera 720P closest to CP.
- Check usability of Big Red Bee GPS tracker in combination with a Kenwood TH-D7 transceiver.
- Fin can –check new alignment method by means of angle sections to reduce spin.
Flight 1 DECA IV – Friday 19.10.2012
The launch rail was erected and set at 65° azimuth and 85° elevation. Joining of the recovery & payload section to the motor was done near the launch rail and consisted out of taping two 8mm (tested with 10mm tapes) wide aluminium tapes to hold both sections and would sheared upon ignition of the 2gr BP apogee separation charge. The GSM GPS tracker & Beeline GPS tracker had been powered up upon arrival at the OTCVust to locate as many satellites as possible. Once again the rocket was inserted into the lower third of the rail with ease. Payload and the outlooking Turnigy camera were activated and secured with three screws. The down looking key chain camera was subsequently activated. The RDAS Tiny flight control altimeter was powered on and started beeping once a second indicating all systems / igniters were functioning. The motor igniter was inserted but got stuck at ¾ way. This was becasue 2 of the 8 bates grains had a reduced core diameter. Likely caused of early core removed while not fully hardened. Keeping in mind that the grains are produced under spring pressure and trapped air is compressed. By not allowing it to fully harden the propellant likely expanded a bit thereby reducing the core diameter. This phenomenon was discovered during coating and concluded not to effect motor performance. However inserting of the motor igniter was not considered. Since the motor igniter was designed to direct the hot BP/MG gasses / particles to the forward closure it was decided (what else was to do) to launch any way as the down side would be neglectable.
Again after the range was cleared and “Bureau Veiligheid” confirmed to proceed the 10s count down began at 11:39. After near instant ignition the rocket leaped out of the rail travelling straight up, no weather cocking and soon to be out of sight leaving everybody surprised. The only thing remained was a white smoke trail while every body wat looking at the sky for a parachute. Meanwhile the BigRedBee tracker kept sending positions. Apogee was expected to be at T+22s. In case of a ballistic trajectory it was expected that after 44s no packets would be received. However more then a minute into the flight positions were still coming in, indicating successful apogee separation. After two minutes or so the Bigredbee messages stopped coming in. However the GSM GPS tracker was also sending every 20s its position which didn’t changed indicating successful soft recovery. Nobody spotted the rocket under parachute nether did the three military spotters in the field. With everybody puzzled whether this was a successful flight GPS positions kept coming in. Soon the GPS coordinates were put into Google Maps which resulted in a landing spot 1800m away from the launch rail but perfectly centered in the width of the field. This position was translated to a more workable position for the spotters in the field. The position was near “ pink panther” a pink painted target tank and a dummy house right next to the road. Sure enough within 5min I got the rocket back in my possession with the military being impressed that two modern rocket locating systems gave the rocket positions while nobody saw the rocket actually landing. Quick inspection showed rocket had functioned perfectly. The outside mounted camera was still attached and the main parachute had deployed as designed. RDAS Tiny beeped out 8.968ft. Soon the files from the camera’s were downloaded and were played back on my laptop. Below a summary of the flight can be found on Youtube.



GPS track DECA IV 19.10.2012_fixed
The surprising results from the RDAS Tiny indicated 58 G’s. A normal burn would be 18 G’s max. So lets calculate what the chamber pressure at 58G’s
Pc . At = ( F / g ) / CF
-
F = 2445N ((4,3kg * 9,81)*58G)
-
CF = 1,30
-
Throat area ( At = 2,02 )
-
g = 9,81 m/s²
Pc • 2,02= (2445 / 9,81 ) / 1,30
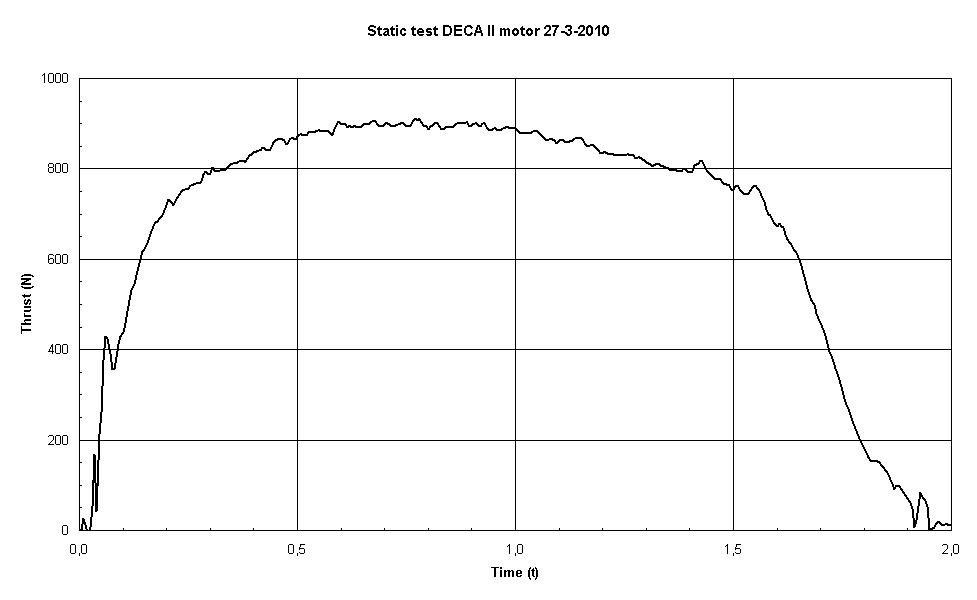
Pc = 94.9bar !! Design pressure of this motor is 60bar. These grains were initially cast for a launch day in July 2012 and put into desiccator with calcium chloride to remove all moisture. Normally I leave the grains in the desiccator for a week and then vacuum seal the whole lot ready for the forth coming launch day. This time I left it accidentally with the calcium chloride for over 2 months. Although I knew from previous Thrust motor flights that extensive time in a desiccator results in really fast burn rates and unpredictably thrust curves I decided to use the grains anyway. Normally the DECA 8-grain motor is very conservative only running at a chamber pressure of 35-40bar. The casing that been pressure tested up to 90bar so I was quite confident nothing would happen. However upon ignition the rocket left the rail like lighting. The triangular thrust curve derived from the RDAS date also indicates that the ends of the grains were not ignited. For this flight I opted to use meal powder & NC lacquer to coat the grain instead of ground commercial BP to slow down ignition a bit. Next flight I will use regular BP again.
20121105 – Thrust reconstruction DECA IV flight 1
Rocket landing coordinates:
- GSM GPS tracker – lat: 52.407178 – long: 005.941552
- Beeline 70cm GPS tracker – lat: xxx xxxx – long: xxxx
Conclusion
- Fly in sustainer ready version, as stable as possible to 2+km – The long slender rocket flew very stable likely due to the static margin of 4,83 cal. There was almost no wind during the launch so no weather cocking. On board video does show a deviation from the theoretical flight path while under thrust. Apogee at 2.600m was significantly higher than expected, caused by a conservative Cd used the the simulations. In the end the DECA IV can be flown confidently as a sustainer.
- Check usability of outside mounted key chain camera 720P closest to CP – Key chain camera performed superbly. It is amazing how such a low cost camera, simply bolted to the outside of the rocket with a M3 bolt , recorded a clear on board movie of the entire flight. Highly recommend for all future flights. Camera did not seem to effect stability of the rocket.
- Check usability of Big Red Bee GPS tracker in combination with a plain Kenwood TH-D7 transceiver – Some problems were encountered during the preparations with not sending GPS coordinates along with the APRS messages and was found in a faulty cable connection between antenna and BRB GPS tracker. Secondly, the antenna was repositioned at an angle facing more skywards rather then perpendicular to the rocket hoping to get a better fix. However there were still little satellites found and insufficient locks were obtained to have a proper 3D flight path output. Biggest plus: Receiving messages of an out of sight rocket well past the time of an ballistic flight: priceless. The BRB worked great in the air while the GSM GPS worked great after landing. All future flight will have both the BRD GPS tracker and the GSM GPS. Interface is a little troublesome and does not work plug-and-play
- Fin can –check new alignment method by means of angle sections to reduce spin– New method found to be acceptable. Altough spin was not eliminated it provide to be much better than the DECA III flight. To be used for next constructions.

















Post flight analysis – by BO
- ***
Design & Construction
Motor – DECA 8 graing KNDX:
Actual stack length (8grains)= 555mm. Length motor chamber 570mm; liner length 569mm; clearance 1mm.
Average coating on the grains (pinch of NC lacquer combined with isopropanol and meal powder. 0,4gr – all surfaces painted. Total coating 3,4gr.
Average grain length: 64,4mm. Average grain density (actual/ideal): 99%. Average grain mass: 147,2gr. Core diameter 20,5mm.
Igniter: 6,0gr (3,0gr commercial 3F BP + 3,0gr of magnesium. ==> 3,0gr BP + 3,3gr meal powder approximates 6,3gr BP. With this motor set up this would give a igniter chamber pressure of 43bar. Pmax static test was 36,5bar. Althougn start up was instant it showed a slight a dip at start-up hence a healthier igniter charge of +0,5gr BP is used. Coating of the grains changed from BP to green meal to allow a elongated (less instant) transfer of heat to the KNDX.
{kind=link}
Fin can:
Total mass GF, 4×2 pieces = 36,6grams. That is 9gr GF per fin-to-fin lay up. Epoxy for 50/50 => +/- 10 gr each side. Epoxy batch size = 21gr each. 14gr epoxy, 7 r harder. Actual use epoxy: 10,2 gram.
Sustainer fin can made out of Performance Rocketry G12 base material – airframe tubing:



















































Body tube:
Performance Rocketry G12 base material – airframe tubing
Recovery
Main parachute 800mm diameter + 1m tubular kevlar with end spliced for connection to d-shackle. 5m tubular kevlar with both ends spliced for d-shackle. Payload with M6 eye bolt for connection to d-shackle. Burrito style parachute bag. Kevlar cloth 350 x 235mm. Length = spare (60mm) + length parachute (150mm) +GPS tracker (70mm) + overlap (70mm) = 350mm. Width = 1,5 · π · ID tube = 235mm.
A 2,0gram apogee straw charge was used – checked 25/09/2012.
Tumble free fall equals an (fictive) hemispherical parachute of 0,45m diameter with Cd of 1,75.
Under parachute is an hemispherical parachute of 0,8m diameter with Cd of 1,8.
Above mentioned values are derived from the DECA III descent actuals verified in flight I 13-05-2011:
- Tumble free fall DECA III rocket = 25,3m/s
- Under parachute = 12,5m/s.
- Rocket mass = 3,8kg
Payload
Payload built by BO and will contain:
- RDAS Tiny
- IMU
- I-AM sensor package
- Big Red Bee GPS tracker – mass 56,5gr
- 640×480, 30fps – Turnigy camera – looking out
Rocket will further more contain:
- 1280×720, 30fps – “#11 HD Key Chain camera” – looking down
- real time mini GPS tracker
Assembled rocket & payload. Determined Cp & Cg. Static margin of 4,83 cal.
Notes
Length:
- Parachute in tube 1/6: 200mm
- Parachute in tube 1/4: 260mm
- First stage kevlar shock cord: 100mm
- GPS tracker: 65mm
Glass Body tube
- OD = 57.8mm
- ID = 54.6mm
Glass Coupler tube
- OD 54.5mm
- ID = 50.9mm
Battery decay after one launch & 6 months: 9,6 to 8,8VDC (from 19.10.2012 to 16.03.2013). RDAS Tiny still functional and able to fire a yellow fuse head wired as igniter 3 / sustainer ignition.
Library
- 20121019 – Flight I – SRM, Aerolab, Altical, PSS & NERO basic RSDS – all files as submitted prior to the flight.
- Manual beelineGPS_13 – Manual Big Red Bee GPS tracker
- Manual TH-D7-Dutch – Manual Kenwood TH-D7 transceiver
- RDAS Tiny addendum – 15.04.10
- Manual GPS tracker – Mini Real-Time Spy GSM GPRS GPS Tracker, Tracking Device